Motion Prediction for Urban Autonomous Driving Based on Stochastic Policy Learned via Deep Neural Network
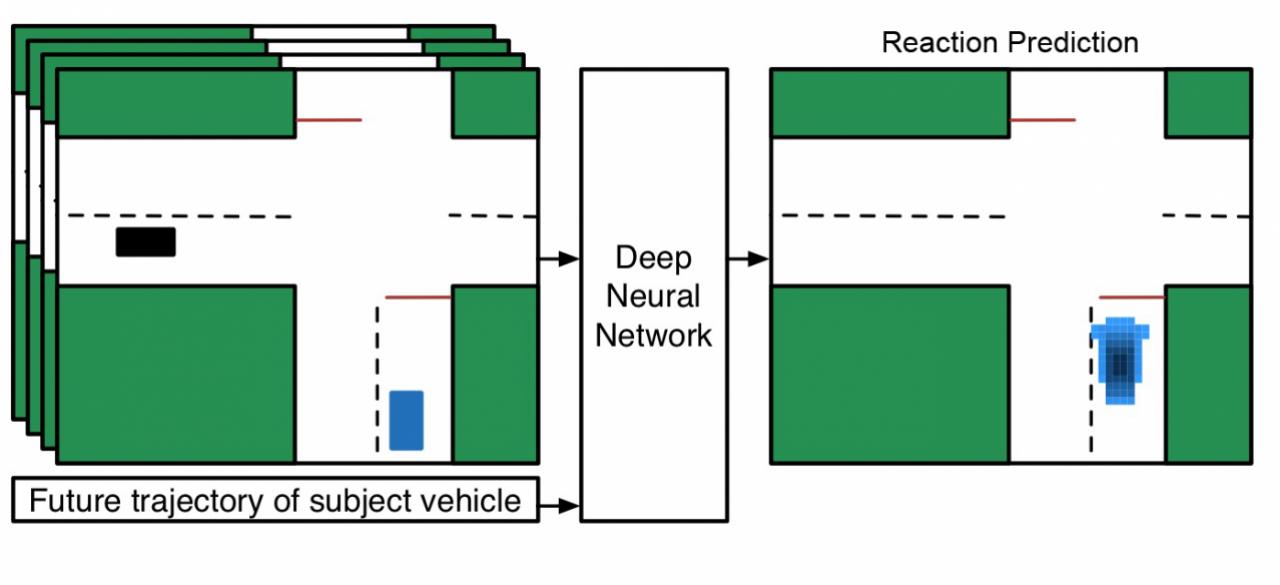
Reaction Prediction: Given a stack of current states and the future trajectory of the subject vehicle, reaction prediction outputs the probability distribution of possible future motions of all participants except for the subject vehicle, which implies how such future motion will impact the traffic, to facilitate the local trajectory planning.
ABOUT THE PROJECT
At a glance
To safely drive in an urban environment, an autonomous vehicle should recognize and predict the future motion of other road users. Conversely, an autonomous vehicle should estimate how other road participants may perceive and predict the future motion of the subject vehicle. In this project, a novel motion prediction methodology is proposed by employing deep neural network (DNN) to obtain the stochastic driving policy to approximate human driver behaviors.
Human drivers have the capability to execute a complex stochastic driving policy with fast reflex, comprehensively taking multiple factors into consideration such as time‐efficiency, comfort, traffic rule/courtesy, vehicle kinematics/dynamics, road structure, static obstacles, and behavior of other road participants. Some of these factors can hardly be modeled and quantified. DNN is a powerful tool to mimic and learn the complex policy of human drivers to predict the possible future motion without heavy online computational loads. In this project, we will design and train an action prediction DNN to evaluate how human-like the subject autonomous vehicle behaves, as well as a reaction prediction DNN to predict the impact of planned trajectories.
Human drivers have the capability to execute a complex stochastic driving policy with fast reflex, comprehensively taking multiple factors into consideration such as time‐efficiency, comfort, traffic rule/courtesy, vehicle kinematics/dynamics, road structure, static obstacles, and behavior of other road participants. Some of these factors can hardly be modeled and quantified. DNN is a powerful tool to mimic and learn the complex policy of human drivers to predict the possible future motion without heavy online computational loads. In this project, we will design and train an action prediction DNN to evaluate how human-like the subject autonomous vehicle behaves, as well as a reaction prediction DNN to predict the impact of planned trajectories.
| PRINCIPAL INVESTIGATORS | RESEARCHERS | THEMES |
|---|---|---|
| Masayoshi Tomizuka | Wei Zhan | Deep Neural Networks Stochastic Policy |